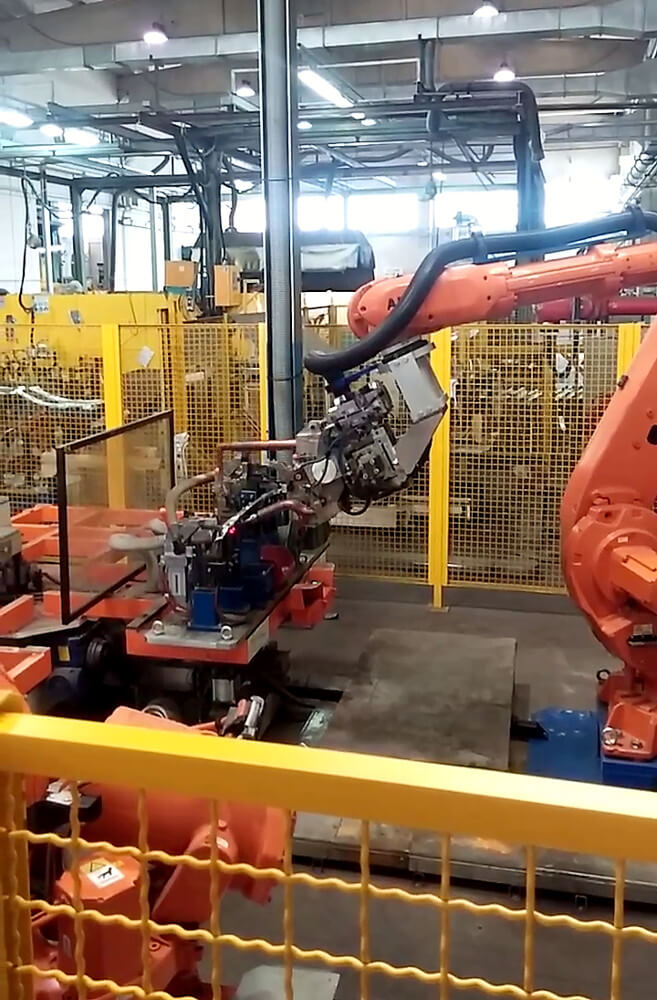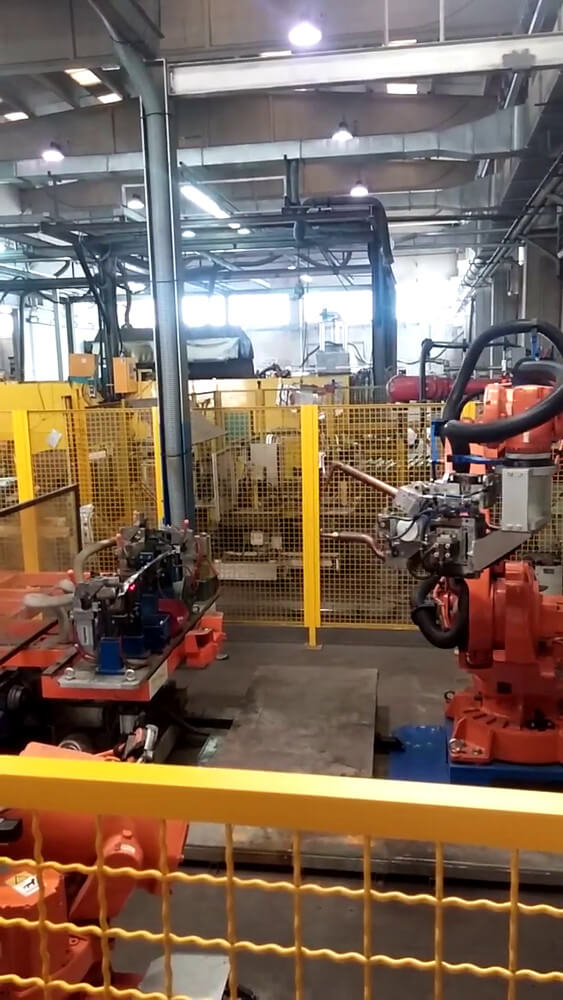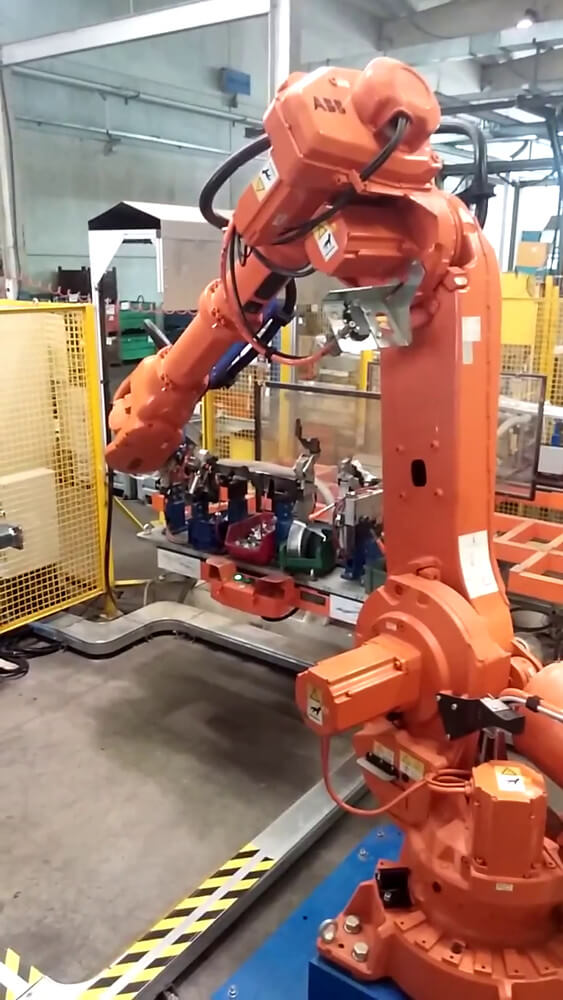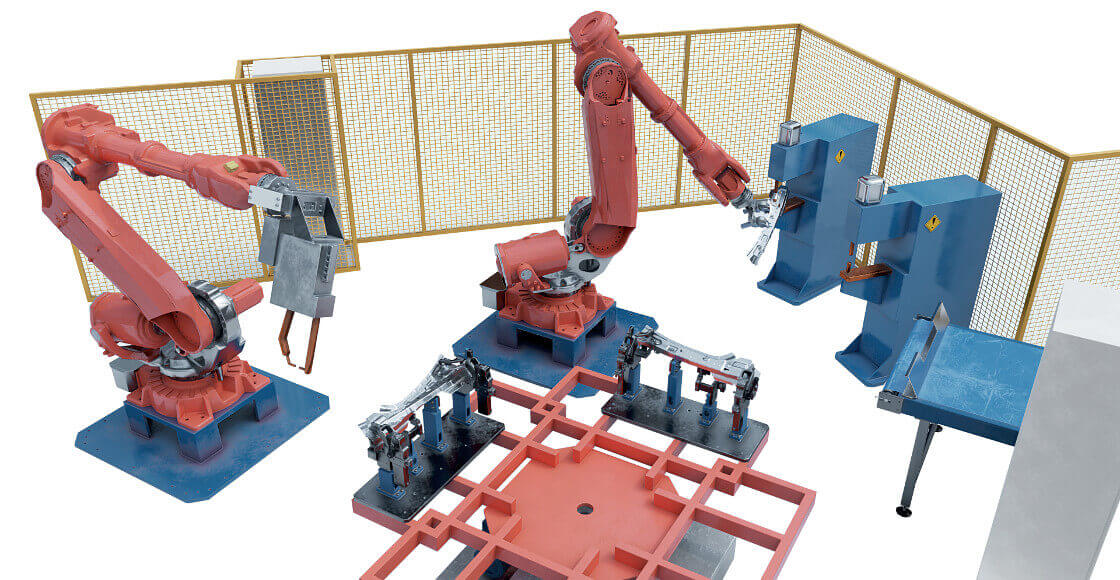
The station consists of a rotary table, no. 2 nut welding machines, a pick-up robot, a punching robot, and an unloading conveyor. Once the spars have been manually loaded onto the rotary table, the table rotation feeds them to the punching robot thus freeing a new loading slot for the operator.
The punched spars are available to the pick-up robot at the next rotation.
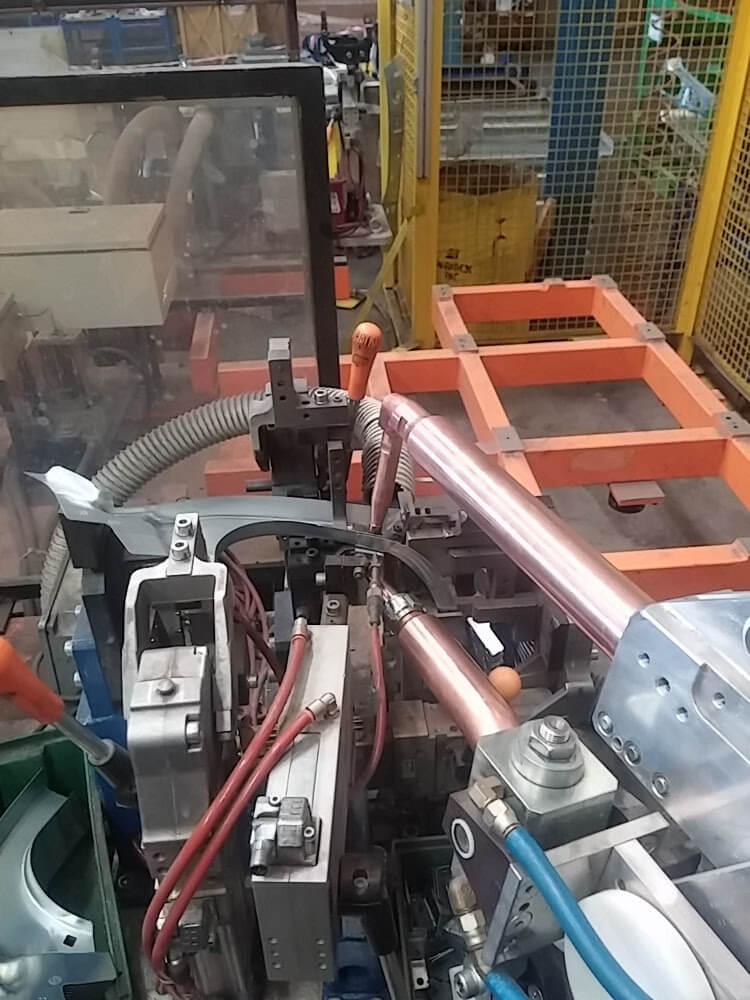
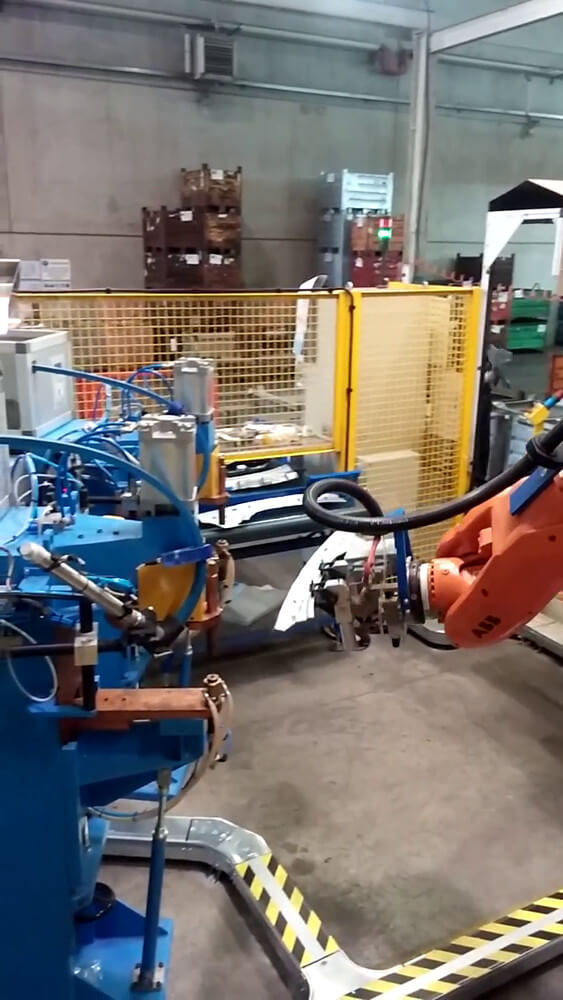
The pick-up robot, equipped with an on board electropneumatic gripper for the picking of both spars (left and right), performs the task of taking the spars from the rotary table to the welding machine for assembling the nuts.
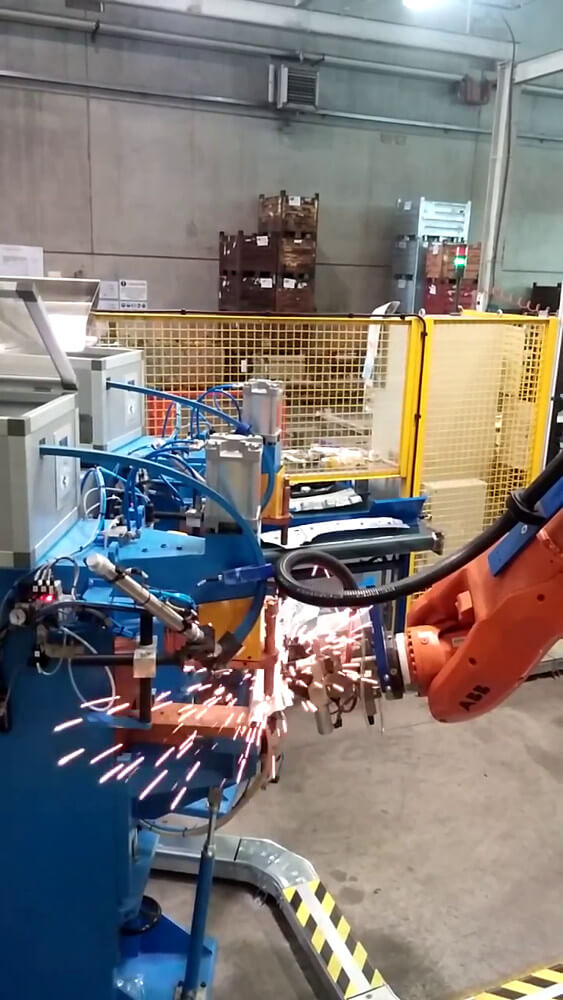
The process provides initially for the welding of the automatically positioned M8 nut and subsequently for the welding of the M6 nut and its collar. Once all operations have been completed, the spars are deposited on a motorized conveyor with a length of approximately 2500 mm.
GALLERY